


 |
 |

|
 |
 |
[A A] |
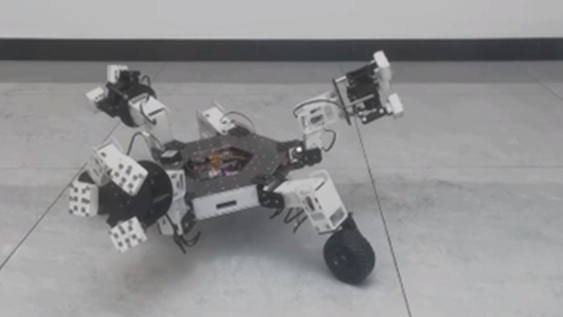
La Chine dévoile son premier robot minier spatial développé dans le pays

Le premier robot minier spatial chinois a été développé par l'Université chinoise des mines et des technologies (CUMT). Il peut non seulement s’adapter aux conditions de microgravité spatiale, mais également naviguer sur le terrain accidenté et cratérisé des astéroïdes, a rapporté dimanche CCTV News. Des brevets ont maintenant été déposés auprès des autorités compétentes pour le prototype, et ce dernier a passé avec succès les évaluations préliminaires.
Ce robot minier spatial multifonctionnel a été développé à la CUMT par une équipe de recherche dirigée par le professeur Liu Xinhua. Selon CCTV, il présente une configuration à six pattes, avec trois membres à roues et trois membres à griffes.
M. Liu a déclaré que ce modèle avait été principalement conçu pour s'adapter à l'environnement de microgravité spatiale.
Les robots miniers spatiaux doivent mener des missions d’exploration géologique et de collecte de minéraux sur des corps extraterrestres, ce qui nécessite des capacités de forage essentielles. Sous la gravité terrestre, le poids du robot suffit à soutenir la pénétration de la foreuse. Cependant, la gravité lunaire ne représente qu'un sixième de celle de la Terre, et les astéroïdes présentent souvent une gravité ultra-faible, ce qui pose d'importants défis pour le forage de leur surface.
Afin de résoudre le problème posé par la microgravité, l'équipe s'est inspirée des structures à griffes et à épines des insectes, et a équipé le robot de membres griffus spécialisés. M. Liu a expliqué que le design du robot améliorait ses capacités d'adhérence et d'ancrage en microgravité, lui permettant de se stabiliser pour l'échantillonnage tout en adaptant ses mouvements au terrain.
Au-delà de l'adaptation à la microgravité, la structure mobile bionique à six pattes du robot combine roues et mécanismes d'ancrage à l'extrémité des membres, ce qui lui permet de traverser les surfaces irrégulières des astéroïdes, selon le reportage de la CCTV.
M. Liu a précisé que des expériences équivalentes avaient été réalisées en microgravité. « Dans des environnements de sol lunaire simulés, le robot peut marcher, s'ancrer et même collecter des échantillons », a-t-il ajouté.
Des brevets ont été maintenant été déposés auprès des autorités compétentes pour le prototype de robot minier, et ce dernier a passé avec succès les évaluations préliminaires, selon la CCTV.
Afin de permettre au robot de mieux résister aux fluctuations extrêmes de température, aux conditions de vide, aux radiations spatiales et aux contraintes de poids et de volume des corps célestes, l'équipe a également construit un terrain d'entraînement simulé.
« Cet environnement simulé reproduit la surface altérée des astéroïdes géocroiseurs grâce à un sol sableux et adopte un système de suspension simulant les variations de microgravité », a expliqué Hua Dezheng, professeur associé à la CUMT. Grâce au fonctionnement coordonné du système de suspension différentielle à six pattes et des mécanismes d’agrippement, le robot peut ajuster sa structure en fonction de l'environnement, s'adaptant ainsi à la complexité de la surface des terrains extraterrestres, ont souligné les membres de l'équipe.
Afin d’acquérir des compétences plus avancées, le robot suivra des tests avancés au « Laboratoire clé d'État de construction intelligente et d'exploitation et de maintenance saines de l'ingénierie souterraine profonde » du CUMT, où l'installation pourra simuler avec précision les conditions extrêmes de la surface lunaire, a précisé CCTV.
Après avoir reproduit l'environnement lunaire, l'équipe dispose d’un sol lunaire simulé dont les propriétés sont très proches de celles du régolithe lunaire réel, pour obtenir une reconstruction haute fidélité des caractéristiques stratigraphiques de la Lune.
« Cela crée des conditions pratiquement identiques à celles de la surface lunaire », a déclaré Li Ruilin, professeur associé du laboratoire. « Les expériences menées dans ces conditions simulées produisent des données très proches des résultats réels des missions lunaires. »
| Source:french.china.org.cn |  |

|
 |









